# Pipeline Hazards --- CS 130 // 2021-12-06 <!--====================================================================--> ## Administrivia - Quiz today (online, untimed, on Gradescope) <!--====================================================================--> # Questions ## ...about anything? <!--====================================================================--> # Pipelining <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Pipelined Datapath <img src='/teaching/2021f/cs130/assets/images/COD/piplined_datapath.png' height='550'> <!----------------------------------> ## Pipelined Datapath - Five stages: 1. **IF**: Instruction Fetch 2. **ID**: Instruction Decode 3. **EX**: Execute 4. **MEM**: Memory access 5. **WB**: Write back <!--====================================================================--> # Hazards <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Hazards - Situations that prevent immediately executing the next instruction in the pipeline are called **hazards** - Three types of hazards: 1. Structure hazards 2. Data hazards 3. Control hazards <!--====================================================================--> ## Structure Hazards - A **structure hazard** occurs when a required resource is busy performing another task - <!-- .element: class="fragment"--> Our MIPS datapath is designed such that no structure hazards are a problem + Read/write to register file can happen in same cycle <!--====================================================================--> ## Data Hazards - A **data hazard** occurs when one instruction depends on the result of a previous instruction - For example: ```mips add $s0, $t0, $t1 sub $t2, $s0, $t3 ``` <!----------------------------------> ## Data Hazards - Would need to stall for two clock cycles in order to wait for the value $s0 to be available for reading 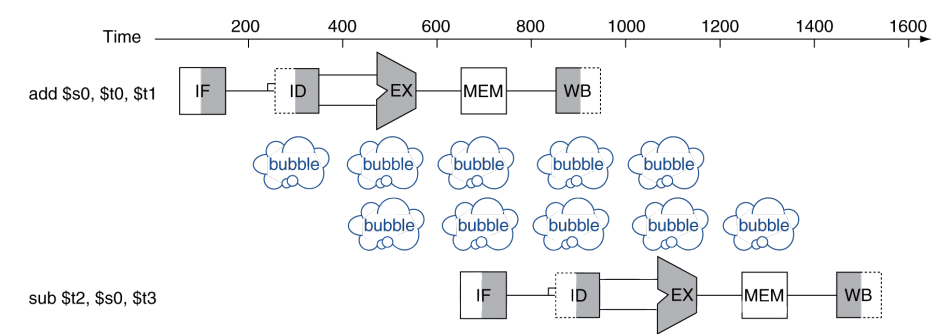 <!----------------------------------> ## Forwarding (aka Bypassing) - One way to avoid some data hazards without stalling is to **forward** the result to the next instruction immediately when it is available 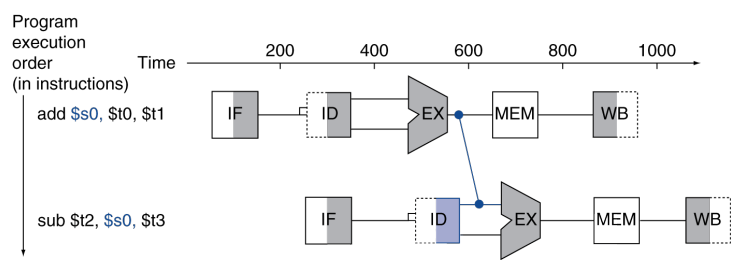 <!--====================================================================--> ## Data Hazard Exercise - Consider the following MIPS code: ```mips lw $t0, 40($a3) add $t6, $t0, $t2 sw $t6, 40($a3) ``` - <!-- .element: class="fragment"--> Assuming there is no forwarding implemented, are any stalls necessary? - <!-- .element: class="fragment"--> How many clock cycles are required to execute these three lines of code without forwarding? <!----------------------------------> ## Data Hazard Exercise - Consider the following MIPS code: ```mips lw $t0, 40($a3) add $t6, $t0, $t2 sw $t6, 40($a3) ``` - Assuming there IS forwarding implemented, are any stalls necessary? - <!-- .element: class="fragment"--> How many clock cycles are required to execute these three lines of code with forwarding? <!--====================================================================--> ## Rearranging Instructions - Another way to avoid data hazards is by **rearranging instructions** - Consider the following MIPS code: ```mips lw $t1, 0($t0) lw $t2, 4($t0) add $t3, $t1, $t2 sw $t3, 12($t0) lw $t4, 8($t0) add $t5, $t1, $t4 sw $t5, 16($t0) ``` - <!-- .element: class="fragment"--> Identify any stalls that are necessary even with forwarding and hazard detection active <!----------------------------------> ## Rearranging Instructions - These two stalls could be avoided by rearranging the code in the following way: ```mips lw $t1, 0($t0) lw $t2, 4($t0) lw $t4, 8($t0) add $t3, $t1, $t2 sw $t3, 12($t0) add $t5, $t1, $t4 sw $t5, 16($t0) ``` <!--====================================================================--> # Control Hazards <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Control Hazards - A **control hazard** (aka branching hazard) is when the next instruction to be executed is not yet known - <!-- .element: class="fragment"--> Caused by **branching** instructions such as `beq` - <!-- .element: class="fragment"--> During a `beq` instruction, at what pipeline stage do we know which branch will be taken? + <!-- .element: class="fragment"--> After Stage 3: EX <!----------------------------------> ## Control Hazards - One way to avoid control hazards is by stalling 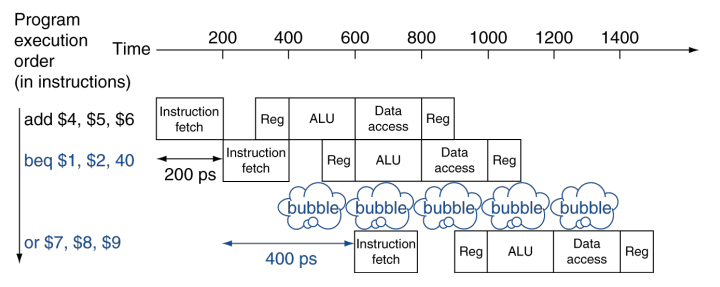 - <!-- .element: class="fragment"--> After every branch statement, we stall for one cycle <!----------------------------------> ## Control Hazards - The pros of the "always stall" approach are: 1. <!-- .element: class="fragment"--> Simple and easy to understand 2. <!-- .element: class="fragment"--> Will always work - <!-- .element: class="fragment"--> The con of "always stall" is: + It is slow <!----------------------------------> ## Control Hazards - An alternative to the always stall approach is **branch prediction** + Make an educated guess on what the next instruction will be and execute that + <!-- .element: class="fragment"--> If incorrectly guessed, "undo" the steps and go to the correct branch <!----------------------------------> ## Control Hazards - **Static branch prediction** will always predict a certain branch depending on the branching behavior + <!-- .element: class="fragment"--> Predict forward branches not taken (conditionals) + <!-- .element: class="fragment"--> Predict backward branches taken (loops) - <!-- .element: class="fragment"--> **Dynamic branch prediction** keeps track of how many times a branch is taken and updates its predictions based on history <!--====================================================================--> # Pipelined Datapath Design <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Pipelined Datapath Design <img src='/teaching/2021f/cs130/assets/images/COD/piplined_datapath.png' height='550'> <!----------------------------------> ## Using Registers (Has Bug) <img src='/teaching/2021f/cs130/assets/images/COD/pipelined_datapath_with_registers.png' height='500'> <!----------------------------------> ## Using Registers (Bug Fixed) <img src='/teaching/2021f/cs130/assets/images/COD/pipelined_datapath_fixed.png' height='500'> <!--====================================================================--> # Pipelined Control <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Pipelined Control Simplified 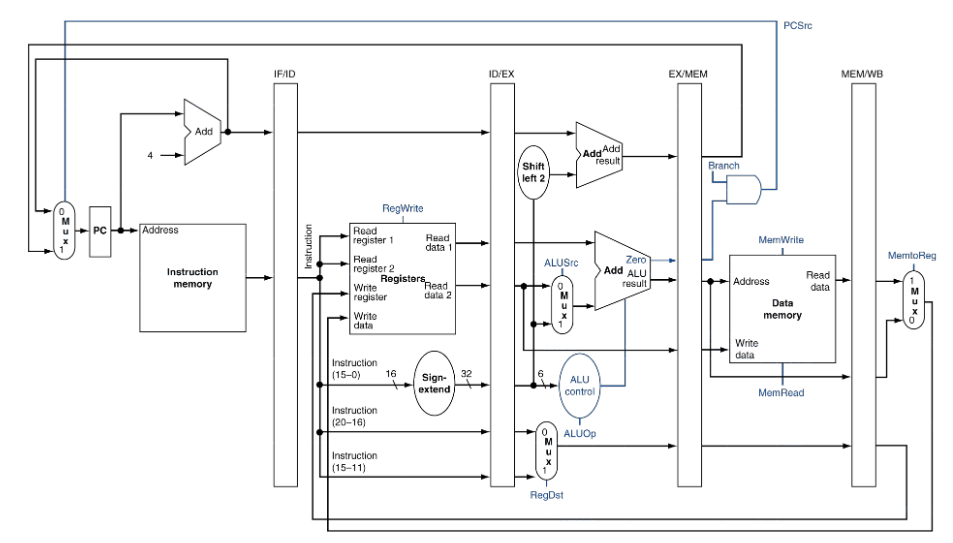 <!----------------------------------> ## Pipelined Control Registers - Control signals derived from instruction and passed through the relevant registers 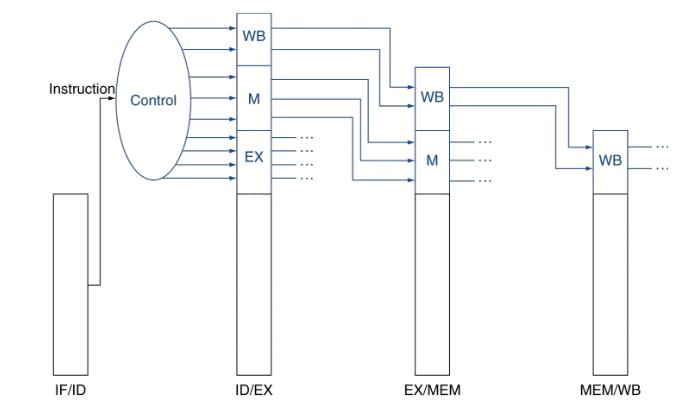 <!----------------------------------> ## Pipelined Control Complete <img src='/teaching/2021f/cs130/assets/images/COD/pipelined_control_complete.png' height='550'> <!--====================================================================--> # Data Hazards ## Forwarding VS Stalling <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Detecting Data Hazards - Consider the following MIPS instructions: ```mips sub $2, $1, $3 and $12, $2, $5 or $13, $6, $2 add $14, $2, $2 sw $15, 100($2) ``` - <!-- .element: class="fragment"--> How many data hazards are present? - <!-- .element: class="fragment"--> All these hazards here can be resolved by forwarding + But how do we detect when we need to forward? <!----------------------------------> ## Detecting Data Hazards <img src='/teaching/2021f/cs130/assets/images/COD/data_hazard_deps.png' height='500'> <!----------------------------------> ## Detecting Data Hazards - Recall that each register has a number from 0 to 31 - <!-- .element: class="fragment"--> We refer to the two source registers as `Rs` and `Rt` and the destination register as `Rd` - <!-- .element: class="fragment"--> Need to pass register numbers through pipeline + `ID/EX.RegRs`: Register number for `Rs` that is in the `ID/EX` pipeline register - <!-- .element: class="fragment"--> ALU operand register numbers in `EX` stage are: + `ID/EX.RegRs` and `ID/EX.RegRt` <!----------------------------------> ## Detecting Data Hazards - Data hazards happen when: + <!-- .element: class="fragment"--> `EX/MEM.RegRd = ID/EX.RegRs` + <!-- .element: class="fragment"--> `EX/MEM.RegRd = ID/EX.RegRt` + <!-- .element: class="fragment"--> `MEM/WB.RegRd = ID/EX.RegRs` + <!-- .element: class="fragment"--> `MEM/WB.RegRd = ID/EX.RegRt` - <!-- .element: class="fragment"--> But only when the forwarding instruction is writing + `EX/MEM.RegWrite` / `MEM/WB.RegWrite` must be asserted - <!-- .element: class="fragment"--> And only if `Rd` for is not `$zero` + `EX/MEM.RegRd` / `MEM/WB.RegRd` is not 0 <!----------------------------------> ## Forwarding Paths <img src='/teaching/2021f/cs130/assets/images/COD/forwarding_paths.png' height='500'> <!----------------------------------> ## Forwarding Conditions - Whenever forwarding is needed, we must forward the result either to the `Rs` register or the `Rt` register - <!-- .element: class="fragment"--> The EX phase must forward to `Rs` if: + `EX/MEM.RegWrite` is asserted + `EX/MEM.RegRd` is not `$zero` + `EX/MEM.RegRd = ID/EX.RegRs`} - <!-- .element: class="fragment"--> Similarly, it must forward to `Rt` if: + `EX/MEM.RegWrite` is asserted + `EX/MEM.RegRd` is not `$zero` + `EX/MEM.RegRd = ID/EX.RegRt` <!--====================================================================--> ## Double Data Hazard - Consider the following MIPS code: ```mips add $1,$1,$2 add $1,$1,$3 add $1,$1,$4 ``` - <!-- .element: class="fragment"--> Both `EX` and `MEM` hazards occur + <!-- .element: class="fragment"--> Want to use the most recent `$1` value - <!-- .element: class="fragment"--> Need to add MEM hazard condition: + Only forward if `EX` hazard condition isn't true <!--====================================================================--> ## Datapath with Forwarding <img src='/teaching/2021f/cs130/assets/images/COD/datapath_with_forwarding.png' height='500'> <!--====================================================================--> # Load-Use Data Hazard <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Load-Use Data Hazard <img src='/teaching/2021f/cs130/assets/images/COD/load_use_data_hazard.png' height='500'> <!----------------------------------> ## Detecting Load-Use Hazards - Check when using instruction is decoded in ID stage - <!-- .element: class="fragment"--> ALU operand register numbers in ID stage are: + `IF/ID.RegRs` + `IF/ID.RegRt` - <!-- .element: class="fragment"--> Load-use hazard occurs when + `ID/EX.MemRead` is asserted + One of the following is true: * `ID/EX.RegRt = IF/ID.RegRs` * `ID/EX.RegRt = IF/ID.RegRt` - <!-- .element: class="fragment"--> If detected, we insert a stall <!--====================================================================--> ## How to Stall the Pipeline - Have EX, MEM, and WB do a `nop` (no operation) + Can make control values zero to accomplish this - <!-- .element: class="fragment"--> Prevent updating PC and IF/ID register + Causes the same instruction to be fetched and decoded a second time <!----------------------------------> ## How to Stall the Pipeline <img src='/teaching/2021f/cs130/assets/images/COD/pipeline_stall_diagram.png' height='500'> <!--====================================================================--> ## Datapath Stall Detection <img src='/teaching/2021f/cs130/assets/images/COD/datapath_with_stall_detection.png' height='500'> <!--====================================================================--> ## Performance - Stalls reduce performance but are necessary to avoid errors - <!-- .element: class="fragment"--> In practice, the compiler rearranges instructions to avoid as many stalls as possible + Requires detailed knowledge of pipeline implementation - <!-- .element: class="fragment"--> When trying to optimize your high-level code, it is better to trust the compiler to optimize these tasks rather than trying to be clever <!--====================================================================--> # Control Hazards <!-- .slide: data-background="#004477" --> <!--====================================================================--> ## Control Hazards - A **control hazard** (aka branching hazard) is when the next instruction to be executed is not yet known - Caused by **branching** instructions such as `beq` <!----------------------------------> ## Control Hazards - One way to avoid control hazards is by stalling  - <!-- .element: class="fragment"--> After every branch statement, we stall for one cycle <!----------------------------------> ## Control Hazards - An alternative to the always stall approach is **branch prediction** + Make an educated guess on what the next instruction will be and execute that + <!-- .element: class="fragment"--> If incorrectly guessed, "undo" the steps and go to the correct branch <!----------------------------------> ## Control Hazards - **Static branch prediction** will always predict a certain branch depending on its type + <!-- .element: class="fragment"--> Predict forward branches not taken (conditionals) + <!-- .element: class="fragment"--> Predict backward branches taken (loops) - <!-- .element: class="fragment"--> **Dynamic branch prediction** keeps track of how many times a branch is taken and updates its predictions based on history + <!-- .element: class="fragment"--> Modern dynamic branch prediction guesses correctly over 90% of the time